
Researchers at New York University Abu Dhabi (NYUAD) have developed soft, flexible sensors that help restore a surgeon’s sense of touch during minimally invasive, or “keyhole,” surgery.
In the study, published in Microsystems & Nanoengineering, the team, led by NYU Abu Dhabi Associate Professor of Mechanical Engineering and Bioengineering Mohammad A. Qasaimeh, designed multichannel soft sensors that can measure a wide range of forces, from very light contact to stronger gripping, in real time.
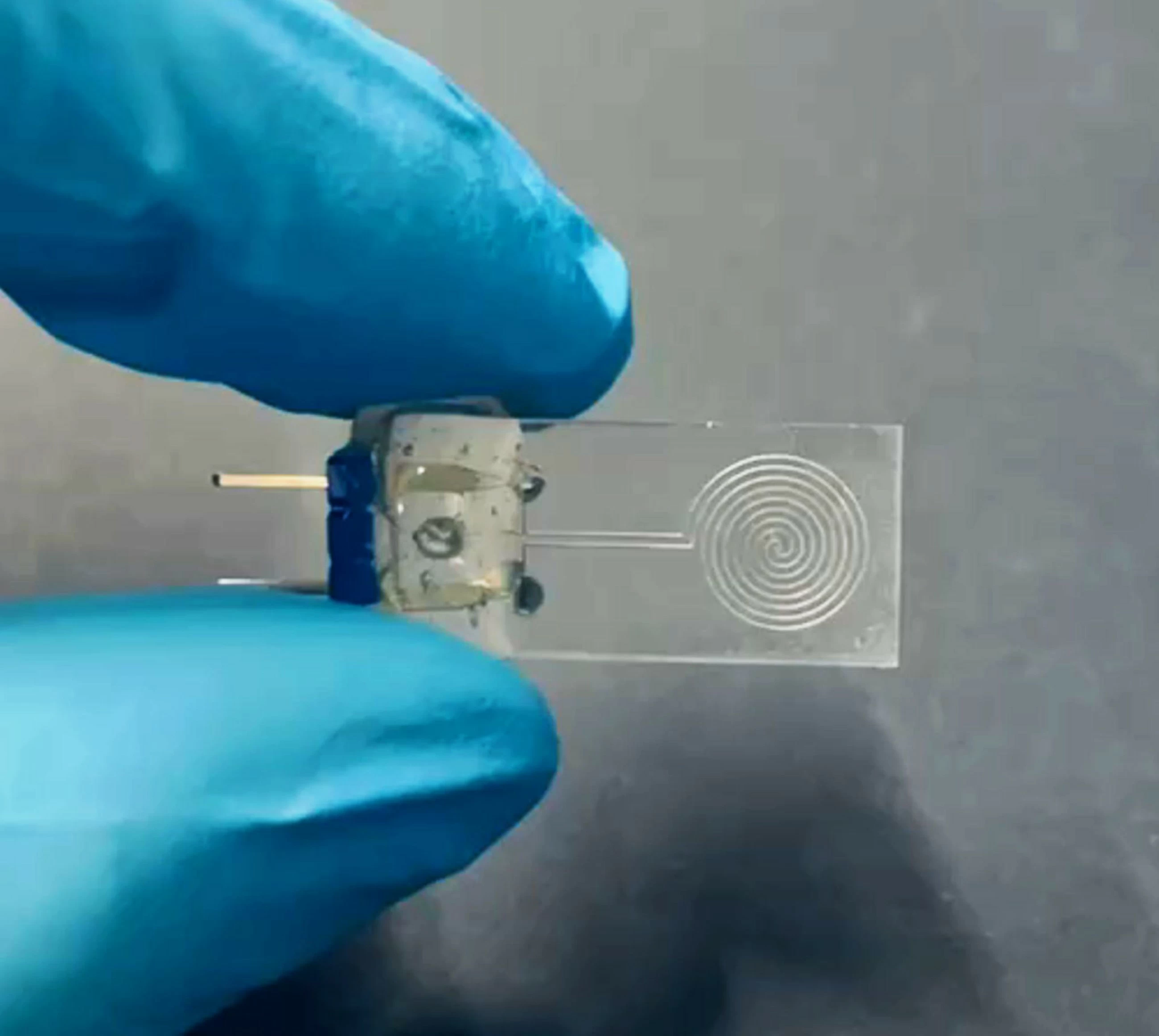
The sensors are made from soft silicone with tiny channels filled with liquid metal. When pressure is applied, the channels deform slightly, allowing the system to detect and measure force.
To demonstrate the technology, the researchers integrated the sensors into a laparoscopic grasper. One sensor was placed on the handle to measure the force applied by the surgeon, while another was placed on the tool’s jaw to measure how it interacts with tissue.
“Minimally invasive surgery benefits patients, but it also removes a key human capability: the surgeon’s sense of touch,” said Mohammad A. Qasaimeh, Associate Professor of Mechanical Engineering and Bioengineering at NYU Abu Dhabi and senior author of the study. “In this work, we developed soft sensors that can capture a wide range of forces while remaining easy to integrate with existing tools, moving us closer to smarter and safer surgical instruments.”
Wael Othman, First Author of the Study and Assistant Professor at Khalifa University) said, “Our goal was to create sensors that are both sensitive and practical for real surgical environments. This design allows us to measure both gentle and strong forces within the same small device, and to place sensors where they are most useful on surgical tools.”
Beyond surgery, this technology could be used in robotics, wearable devices, and other systems that require accurate force sensing.
WAM





